

{kind=link}
All the quadrupeds we cowl have inflexible one-piece our bodies, which appears to be a great shout for many of the antics they stand up to. However a versatile backbone could be higher in sure climbing conditions, and that is the place the KLEIYN robodog might shine.
As we have seen from the likes of the ANYmal, Lynx and Go2, quadruped robots with inflexible backs usually are not solely helpful for hauling gear however fairly agile too. However having some flex may very well be helpful too, if they should squeeze into tight areas comparable to climbing up the within of a chimney, for instance.
Scientists on the identical College of Tokyo lab that introduced us an anatomically right musculoskeletal robotic, a flying DRAGON and a humanoid chauffeur have launched a robodog with a jointed again to sort out simply such a process, in addition to attacking varied-height terrain – such as you would possibly discover in catastrophe websites – with ease.

JSK
That waist joint implies that the again might be arched barely to scale back the physique size of the robotic, or flexed to navigate by way of complicated environments. Fairly than mount grippers or claws to the ends of the ft to assist KLEIYN grasp uneven vertical surfaces and defy gravity, the JSK staff opted to have the leg joints exert enough stress in opposition to opposing easy partitions to maintain the robotic aloft.
Every leg has three levels of freedom plus a pitch-axis joint on the “shoulder” and rear “knee.” All leg joints sport actuators with a 1:10 discount ratio and torque of 25 Nm (18.4 lb.ft). The place each “calf” hyperlinks of robodogs just like the Go2 and Lynx face the identical means, the JSK bot has them dealing with reverse instructions for higher vertical contact on the pads with out impacting its strolling gait.
The waist joint has one diploma of freedom and 1:9 discount ratio gearing on the 40-Nm (29.5-lb.ft) motor. It is hooked up to equivalent physique packing containers wrapped in aluminum that home elements just like the battery and onboard pc – one to the entrance that is topped by a LiDAR unit with built-in IMU and one other on the again.
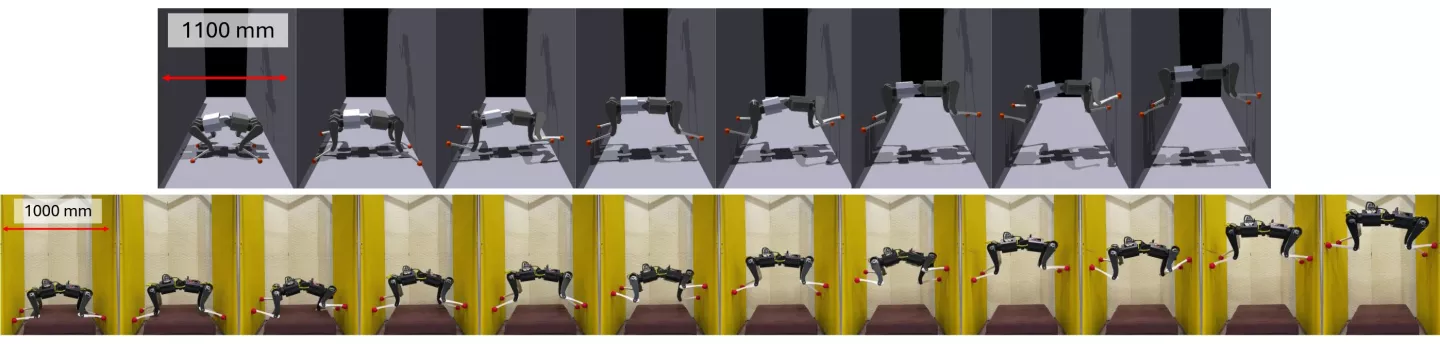
The researchers employed a novel reinforcement studying platform referred to as Contact-Guided Curriculum Studying to provide the quadruped the digital expertise wanted to grasp its chimney climbing chops from a standing place. After coaching in digital areas, the staff erected two ply boards to type three units of partitions, every with a distinct hole width between them – 800, 900 and 1,000 mm.
JSK
The quadruped was then despatched a command to climb. Within the case of the 800-mm hole, the robotic managed climb speeds of as much as 170 mm per second, which the staff says is 50x sooner than UCLA’s RoMeLa SiLVIA hexapod – which is reported to scramble up at 3 mm/s. The staff additionally examined common locomotion, tackling stairs and strolling over uneven surfaces.
The KLEIYN robodog weighs in a 13 kg (28.6 lb), stands 400 mm (15.7 in) tall, and has a straight physique size of 760 mm (~30 in). Sensible functions for industrial inspections are pretty apparent, however search and rescue operations may also profit from this versatile design and digital studying platform.
A paper on the venture is on the market on arXiv. The video beneath has extra.
KLEIYN : A Quadruped Robotic with an Energetic Waist for Wall Climbing (IROS 2025)
Supply: JSK