

{kind=link}
Exactly two years ago, a small yet groundbreaking robotic manta ray became the world’s swiftest and most agile soft-bodied robot. Properly, one of its descendants has now torn apart the document – and it employs much less power than its predecessor, besides.
The 22.8-millimeter-long device was designed by Associated Professionals. Prof. Researchers Jie Yin and their colleagues from North Carolina State University.
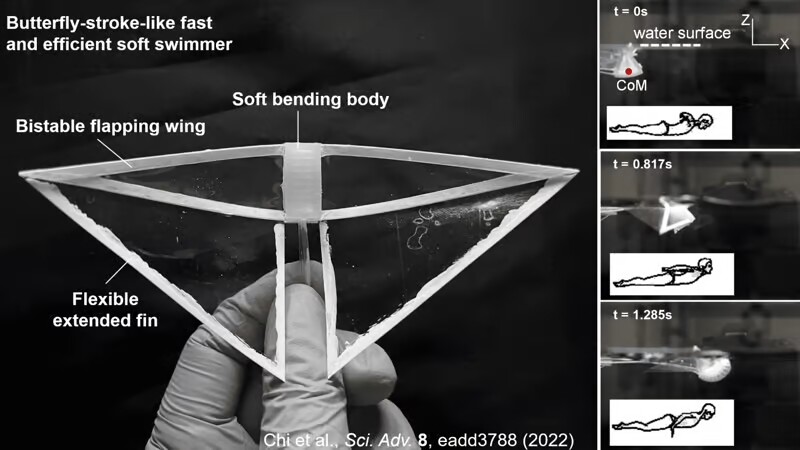
The device sported two adaptable polyester appendages resembling manta-ray fins, originally the opposing termini of a continuous, bistable curve. Bistability describes the property of certain tensegrity structures to remain stable in either of two distinct configurations, without the need for external forces or energy inputs, exemplified by the humble hair clip’s ability to stay open or closed with minimal effort.
North Carolina State College
At the heart of the robotic’s innovative wing design lay a clever combination of high and low-pressure silicone pneumatic actuators, carefully positioned to sandwich the crucial bistable structure.
As compressed air surged through the highest actuator, it triggered the wing’s central structure to flex upwards, generating a force that caused the two wings to converge and snap into their predetermined position. When the primary actuator’s pressure was deliberately reduced and the backside One wing was inflated, causing the aircraft to pitch in the opposite direction, forcing the wings to rise once more. As illustrated in the accompanying video, the underlying mechanism is showcased.
A novel, fin-like propulsion system enables a lightweight, eco-conscious underwater explorer to glide effortlessly through the aquatic realm.
Activated by two actuators operating in tandem, an external air pump enables rapid wing flapping, enabling a median swimming velocity of 3.74 body lengths per second. According to scientists, this achievement represents a remarkable 4-fold improvement over previously possible speeds for soft-bodied swimming robots.
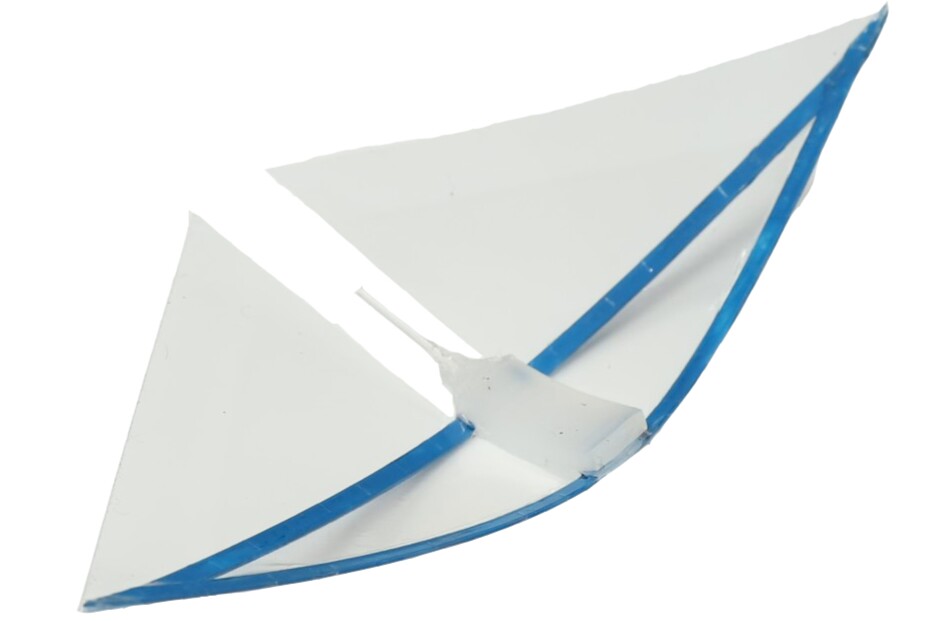
Within the 68-mm-long new Robo-Manta and Yin’s team abandoned the bistable design in conjunction with the underside actuator. The monostable design of the wing construction ensures a consistent and predictable return to its default state: a curved configuration when unpowered, with the wings stowed upwards around the central axis.
Haitao Qing, NC State College
When pressurized, the high-pneumatic actuator unexpectedly retracts, inducing a downward curl that subsequently tugs at the central axis of the wing assembly, causing it to fold downward precipitously. As soon as the actuator’s deflation is permitted, the elastic rebound force inherent in the system prompts a swift recovery to its natural position, causing the wings to spring back up within seconds.
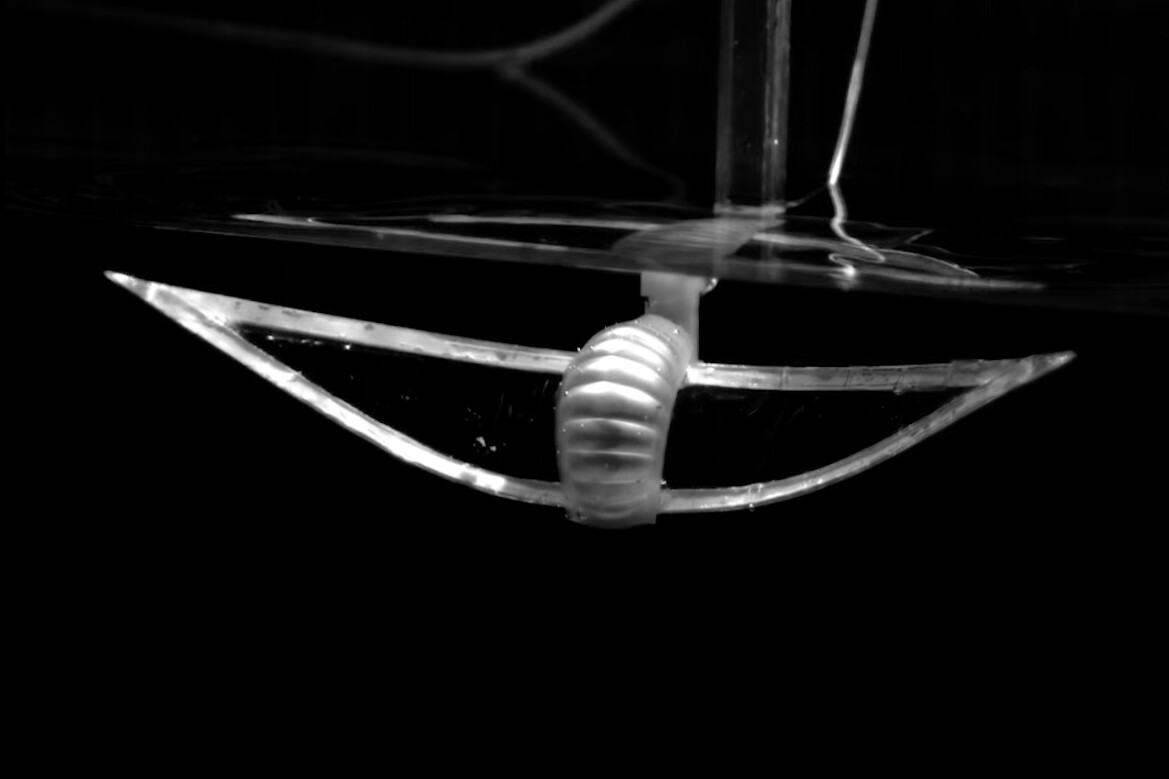
While traditional robots required alternating inflation and deflation of two actuators per up-and-down wing-flapping cycle, consuming significant time and energy, this innovative bot only needs to engage a single actuator. The upgrade enables the robot to achieve a remarkable average swimming speed of 6.8 body lengths per second, while utilizing a mere 1/1.6th the energy required by its predecessor.
Haitao Qing, NC State College
By virtue of its innovative design, the bot is able to navigate vertically within the water column through adjustments in its swimming speed.
When the robot’s fins are in a state of relaxation, the air chamber is vacant, thereby reducing the robot’s buoyancy. According to PhD scholar Haitao Qing, the primary author of the study, when a robot is oscillating its flippers in a slow and gentle manner, it is indeed exhibiting a state of relaxation. As the robot’s fins flap at a faster pace, the air chamber fills more quickly, resulting in increased buoyancy.
Researchers are developing a method for sideway control of the robot, with a focus on its potential applications in oceanic exploration and conservation of marine life. Watch closely, and you’ll likely observe the movement unfolding in real-time within the accompanying video.
A recent study published in a prominent journal has shed new light on the subject of examination. .
Robots inspired by the agility of manta rays, designed for swift and nimble underwater exploration.
Supply: