{kind=link}

In an era marked by rapid advancements in robotics, one pioneering group has diverged from the conventional trajectory, instead finding inspiration in the intricate workings of a tiny flying insect’s brain to develop a robot capable of effortlessly avoiding collisions with minimal energy expenditure.
Researchers from the University of Groningen in the Netherlands and Bielefeld University in Germany drew inspiration from an unlikely source: the insect’s tiny brain, which they saw as a perfect model for improving robotics. Fruit flies (Drosophila melanogasterPilots possessing remarkably easy yet efficient navigational expertise, requiring minimal cerebral effort to seamlessly traverse predetermined flight paths, adaptively altering their trajectory by minute degrees to effortlessly avoid potential hazards while maintaining a precise lateral alignment.
With its diminutive cognitive capabilities, the fruit fly’s processing power is severely limited while in flight; however, researchers envision this natural model being adapted for utilization within the ‘brain’ of a robot to facilitate efficient, low-energy and obstacle-avoiding movement.
“When considering a hypothetical scenario,” remarked Dr. Elisabetta Chicca, a physicist at the University of Groningen. The nearby trees appear to move more rapidly than those farther away from our homes? By leveraging this data, software developers can accurately infer the severity and distance of potential problems.
“What we learn from this experience is that when faced with limited resources, it’s possible to streamline the problem and adapt our approach.”

The processing of movements from surrounding objects in fruit fly brains relies on the coordinated activity of specific optical neurons, namely T4 and T5. Under the guidance of neurobiologist Martin Egelhaaf from Bielefeld College, the team developed an algorithm that emulated this neural exercise for their small robotic “brain,” allowing it to process directional information and navigate efficiently while avoiding collisions with any obstacles in its path.
“While many robotics applications may not necessarily prioritize efficiency, I couldn’t agree more with Chicca’s sentiments.” As humans mature, they naturally absorb new responsibilities, a phenomenon echoed in the rapid advancement of machine learning within the realm of robotics. Bugs are surprisingly adept at taking flight from the very start. A deeply ingrained instinct to adopt an environmentally conscious approach is embedded in their very nature.
The top result is a compact robot designed to navigate towards the area with the lowest motion detection. At the College of Groningen, Thorben Schoepe engineered the hardware behind a wheeled robot that underwent rigorous testing. The results showed that the robot was adept at navigating complex spaces by hearting itself between objects and skillfully adapting its path to circumvent obstacles, much like an insect in flight navigates through dense foliage.
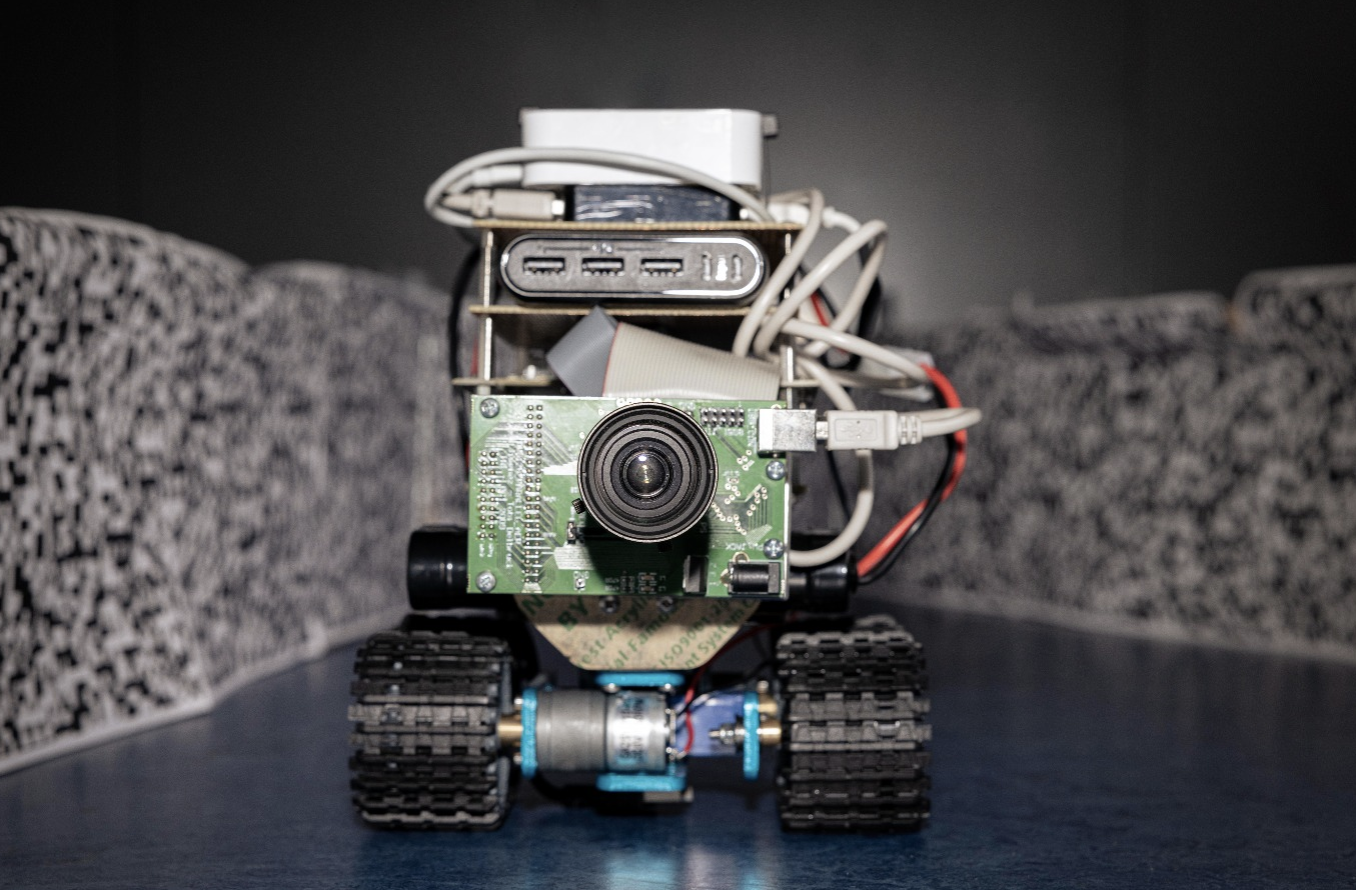
Leoni von Ristok/College of Groningen
“The mannequin’s realism is impressive,” Chicca said, “allowing it to seamlessly perform in any environment once set up.” This is what makes the outcome so extraordinary.
The group’s primary focus is on overcoming obstacles through the development of innovative neuromorphic hardware in robotics, a significant leap forward in this field. As the technology advances, it is possible that such machines will be utilized to traverse complex environments similar to those found on catastrophe websites, characterized by remarkably low energy outputs. These machines may be equipped with a variety of sensors tailored to specific applications, including radar systems capable of detecting unstructured objects.
“We created a robot inspired by the unique features of insects,” said Chicca. The autonomous vehicle boasts exceptional navigational prowess, effortlessly traversing complex terrain while deftly dodging obstacles, bridging chasms, and selecting the safest routes with precision. The neuromorphic network enables the robot to navigate towards regions of minimal discernible motion. Our system capitalises on knowledge of insect visual processing and obstacle avoidance.
The study’s findings were published in a prominent academic publication. .
Supply: