

{kind=link}
| Hearken to this text |

Indoor cell robots rely on autonomous navigation to ensure safe and environmentally friendly delivery of goods. Supply: Relay Robotics
As the concept of autonomous navigation unfolds, one of the initial considerations that typically springs to mind is the development of self-driving vehicles. Despite spanning multiple decades, recent years have witnessed significant advancements.
A crucial framework widely utilized across the autonomous vehicle industry is the categorization of levels of driving autonomy. Outlined by the Society of Automotive Engineers (SAE) in 2014, this standard remains a benchmark within the industry.
While indoor spaces may not have achieved the same level of fame as celebrities, they’ve made significant progress over the past decade nonetheless. As worker shortages persist, robots are increasingly being deployed across diverse sectors, including hospitality, healthcare, warehousing and logistics, food service, and cleaning.
Robotics, particularly relay robots, are being increasingly deployed in busy international settings. While automated driving has established standards for autonomous ranges, a comparable benchmark is currently lacking for indoor robots. Our objective is to develop a comprehensive framework.
The fundamental premise of the Society of Automotive Engineers’ (SAE) framework for self-driving vehicles lies in the allocation of driving responsibilities between the human driver and the autonomous system, assuming a human operator remains available as a backup. Degree zero indicates a complete lack of automation, where a human driver has full control.
The three ranges – 1, 2, and 3 – exhibit distinct degrees of partial automation. At Degree 4, the automobile is fully autonomous under specific, predetermined conditions, but only when certain parameters are met. Major autonomous vehicle developers such as Lyft and Waymo have successfully reached this level of independence.
Lastly, Degree 5 would represent seamless, universal automation in every situation, eliminating any need for human intervention or oversight. Despite progress being made, this milestone remains elusive for now.
Sensor suite configuration?, mapping accuracy?, obstacle detection algorithms?, communication protocols?, environmental complexity?, robot size and shape?, power consumption limitations?.
Set up complexity
Without direct human oversight, indoor robots would lack an inherent partnership with their operator. Initially, they operate at Degree 4 within the SAE framework in this context. Despite indoor robots’ limitations, they possess a significant advantage: the ability to adapt their environment by switching between modes or states at early stages of autonomy.
Modifying a building’s infrastructure, whether through temporary markings on the floor or static signs on walls, presents a relatively straightforward challenge compared to overhauling an entire highway system. Such markers could prove to be extremely valuable assets for the development of advanced automated guided automobile navigation systems.
Currently, indoor robots require a setup process before they are operational. As part of this process, modifications to infrastructure, comprehensive mapping, precise labeling, and other necessary setups may be involved. Carrying out this process typically proves to be both costly, time-consuming, and requiring significant labor input.
The more advanced the navigation capabilities of a robot are, the less complex the setup process typically becomes. Simplifying the setup process reduces barriers to entry, resulting in a lower cost and fewer obstacles for customers to adopt new solutions.
Establishing a clear understanding of complexity is crucial in determining the levels of autonomous navigation required for indoor robots.
Social navigation
A primary difference between self-driving vehicles and indoor autonomous robots lies ultimately in their respective environments. Aside from controlled settings such as factories, many indoor spaces exhibit a significant lack of structure. Without designated lanes or signals, pedestrians must navigate unmarked highways without distinct crossing paths or clear traffic regulations.
Indoor spaces function as hubs of human interaction, fostering an incredibly social atmosphere. Robots are expected to harmoniously interact with various brokers – both human and robotic – occupying the same space. Highway rules, though clearly defined, are often influenced by informal social norms that can vary greatly depending on factors such as country, environment, situation, and numerous other variables. Which roadways do various sorts of vehicles and pedestrians follow around the world? In general, drivers from countries that drive on the right side of the road get their cars serviced on the driver’s side, while those from left-hand traffic regions have theirs done on the passenger’s side.
Effective navigation in disordered, socially dense environments necessitates a distinct set of skills and behaviors, often collectively referred to as “social navigation”. At its highest level, social navigation encompasses a range of abilities that permit a robot to navigate human-populated spaces in a manner that not only preserves but also enhances the experience of those around it.
While traditional navigation prioritizes efficiency and functionality, enabling robots to accomplish tasks but often requiring humans to adjust to their limitations, social navigation instead centers on replicating the nuances of human intelligence, allowing robots to adapt to our habits and needs. While automation may not be crucial in controlled settings like manufacturing facilities or storage spaces, its importance grows exponentially in dynamic, people-filled environments.
Autonomous navigation’s operational area defines the parameters that enable vehicles to operate independently within a designated zone.
A robotic’s operational area refers to the types of environments where it can effectively operate and generate a profit. Indoor environments vary greatly in their unique characteristics. Environments of varying distinctiveness present vastly disparate needs, potentially necessitating diverse levels of navigational complexity.
Warehouses and factories enable robots to excel in simple, security-focused navigation. In contrast to structured environments, inns and eating establishments are inherently unscripted, displaying unpredictable dynamics that necessitate a higher degree of navigational expertise – specifically, social navigation skills. In particularly challenging settings, such as densely populated areas or sensitive environments like hospitals and senior living facilities, effective communication is crucial to ensure seamless collaboration.
While not every indoor setting demands a robot with exceptional social navigation capabilities, placing one with limited social skills in healthcare settings like hospitals can lead to suboptimal performance? To define the operational area of a robot, we must first identify the primary purpose and function of the robotic system?
Multi-floor autonomous navigation
Self-driving vehicles primarily express concern about navigating single-level roads. Despite being predominantly single-story, many structures on Earth feature multiple floors, prompting robots to develop the capacity to navigate these vertical spaces efficiently. Solving the challenge of vertical navigation could lead to a substantial increase in a robot’s operating radius, making it a critical consideration for designing a robot’s scope.
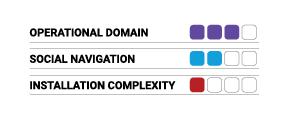
Three primary indicators that define the scope of autonomous navigation in indoor robots are setup complexity, social navigation, and operational area.
While multi-floor navigation is indeed crucial, its relationship to 2D navigation skills is actually complementary rather than orthogonal, as the former builds upon the latter; robots capable of navigating multiple floors would likely develop from those already proficient in 2D navigation. We develop a flexible stage modifier allowing it to be seamlessly integrated into various stages.
Here are some potential definitions for ranges of indoor robotic navigation:
Autonomous indoor robots must navigate complex environments with precision and reliability. Effective autonomy requires a robust understanding of various spatial ranges that enable accurate localization, mapping, and object detection.
Degree 0
These robots lack autonomous navigation capabilities, instead entirely relying on human intervention for their operation. Robots categorised as telepresence robots and distant-managed robots, such as remote-controlled vehicles, fall within this classification.
Degree 1
Robots that rely on a minimum infrastructure, such as pre-defined pathways comprising physical guides like buried wires, magnetic tapes, or painted lines, to navigate solely through bodily mechanisms? These first-generation robots are incapable of deviating from their predetermined courses.
These autonomous guided vehicles (AGVs) lack spatial awareness, relying solely on distance traveled along a predetermined path to inform their navigation decisions. While autonomous vehicles will occasionally detect obstacles and slow down or come to a halt in response, they lack the capability to completely avoid them.

A high-performance Mouse AGC 3A10-20T Automated Guided Cart, designed for efficient movement of heavy loads across various industries? Supply: Toyota
During installation, Degree 1 robots require significant alterations to a building’s infrastructure, leading to substantial costs. They lack fundamental social navigation capabilities, which means they typically thrive in highly structured and controlled settings.

Degree 1 traits. Supply: Relay Robotics
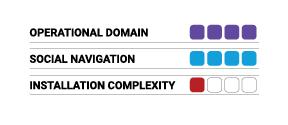
Degree 2
AGVs operating at Degree 2 do not require physical path definitions, yet still rely on digital paths defined during setup. Cell robots can autonomously localise themselves within a website by leveraging external aids such as strategically placed reflectors, fiducials, or beacons that facilitate navigation and positioning. Scientists will utilize this site to monitor the nearly mapped trajectories.
Like Degree 1 robots, these robots are programmed to strictly adhere to predetermined routes and can detect obstacles, but lack the ability to autonomously avoid or circumvent them.

Triangulation of an autonomous guided vehicle (AGV) using reflectors mounted on partition walls demonstrates a reliable method for tracking its position and movement. Supply:
While the necessary infrastructure adjustments may not be as invasive as those in Degree 1, the requirement to establish exterior localization systems increases the overall setup complexity of these robots. These individuals tend to thrive in predictable settings where minimal human interaction is required, suggesting a lack of proficiency in navigating complex social situations.

Degree 2 autonomous navigation traits. Supply: Relay Robotics
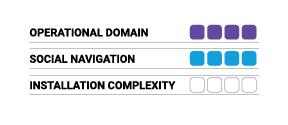
Degree 3
Robots operating at Degree 3 rely exclusively on onboard sensors to navigate their surroundings. Using lidars and/or cameras, autonomous systems generate a detailed map of their surroundings and pinpoint their location within that atmospheric context. Using this map, individuals will chart their unique routes based on specific locations. When encountering obstacles, they adaptively modify their trajectory. To enable them to avoid detecting obstacles and steer clear of them instead.

A 3D lidar point-cloud visualization. Supply: Jose Guivant, ““
Their autonomy and flexibility culminate in impressive social navigation capabilities and significantly simplified deployment, as no infrastructure adjustments are necessary.
Degree three robots can effectively operate in unstructured environments where they will seamlessly navigate among humans. These advanced organisms symbolise a significant leap forward in intelligence, with methods at this stage being referred to as autonomous cell robots. These cutting-edge service robots are considered the epitome of fashion and sophistication in the industry.
Degree 3 autonomous navigation traits. Supply: Relay Robotics
Degree 4
While robots of Degree 3 have advanced to navigating unstructured environments alongside humans, their social navigation skills remain average at best. They lack the advanced social skills necessary for adapting to complex human interactions with finesse. This often necessitates those it communicates with to make adjustments for its inherent behavioural deficiencies.
Unlike their predecessors, Degree 4 robots possess advanced social navigation capabilities that enable them to interact with humans on a level comparable to that of people themselves. They can adeptly traverse any indoor setting, with no physical constraints impeding their progress.
Their operational scope encompasses all indoor settings. Another implication of this is that Degree 4 robots should never require human intervention for navigation purposes.
While progress has not yet been fully attained in this area, the complexities surrounding subtle social navigation persist as a dynamic field of ongoing inquiry. Here is the improved text in a different style:
Effective Infographic on Social Navigation: A Comprehensive Overview

Anthony Francis, et al.
To effectively navigate various indoor settings, robots require the capability to adapt within a constantly evolving and poorly defined algorithm. One aspect of human experience that people often navigate with remarkable facility, yet often without deliberate consideration, is the complexity that underlies this seeming simplicity. Here are several hurdles that need to be overcome in order to achieve human-equivalent social navigation:
- While each person has a personal space that they consider their own, also known as their “private sphere”? While respecting the homeowners’ comfort, robots must navigate with care. While the dynamics of this house party are influenced by a range of factors, including cultural heritage, ambient environment, social setting, attendee demographics, and other variables. What’s more, individuals using walkers may require a slightly larger personal bubble for comfort, but this space must adaptably compress when navigating elevators or other confined spaces. Specifying guidelines for each scenario can quickly become unwieldy.
- Buildings’ infrastructure, comprising doorways, elevators, and shared resources, harbors an inherent procedural framework. In certain contexts where building construction continues uninterrupted, prevailing navigation patterns may not remain relevant. While utilizing these sources, robots should also adhere to certain social norms as well? Holding open doors for others is considered a thoughtful and courteous gesture. As elevators fill up, it’s considerate of individuals to vacate early, allowing others to debark freely, and occasionally stepping out altogether to clear a path for those exiting.
- Robots aim to develop the capacity for open communication of their intentions, enabling them to effectively collaborate and negotiate with various brokers while navigating complex interactions. Failing to take action in a timely manner can often lead to ambiguity and disarray. Individuals often convey messages through nonverbal cues, such as body language, direct eye contact, and verbal interactions. When navigating shared spaces, we often find ourselves in precarious situations, such as simultaneously approaching the same door or navigating a narrow hallway alongside another person. Robots strive to address situations like this while safeguarding the safety and comfort of those they engage with.
Reaching this milestone of social navigation is a profoundly arduous endeavor. While existing Degree 3 robots may have addressed some of these challenges, significant progress remains necessary to achieve true Degree 4 autonomy.
Degree 4 indoor navigation traits. Supply: Relay Robotics
Degree 5
Capable of navigating unfamiliar environments, humans rely heavily on visual cues, leveraging semantic patterns to inform their journey, and seeking guidance from others when necessary. Robots currently lack the capability to perform that task. At a minimum, the location should be thoroughly mapped throughout setup to ensure seamless execution.

Indoor Navigation of Autonomous Service Robots: Achieving Level 5 Autonomy. What’s the original text you’d like me to improve?
Degree-five robots are designed to autonomously navigate complex indoor environments with the same level of proficiency as humans, without relying on pre-built maps or manual setup procedures, even in previously uncharted territories. By eliminating setup complexity entirely, robots can swiftly operate in novel settings, minimizing barriers to entry and facilitating their broader deployment.
Within the autonomous vehicle development framework, one potential roadblock lies in the creation of precise 3D maps of a given area, which must be thoroughly annotated before a self-driving car can safely operate within it. The advancements in artificial intelligence could facilitate the realization of Level 5 autonomy.
Rapid adaptability in uncharted terrain characterizes degree 5 cell robotic navigation, wherein algorithmic precision converges with real-time situational awareness to orchestrate efficient movement patterns, deftly sidestepping obstacles and recalibrating course as needed to achieve optimal pathfinding efficacy. Supply: Relay Robotics
Multi-floor autonomous navigation+
Robots capable of climbing stairs as well as boarding and departing elevators can unlock the potential for multi-floor navigation, earning them a “plus” designation. Extremely reliable sensors are essential to detect and prevent potential security risks such as stairwells and escalators for robots operating in multi-story buildings, thereby ensuring a safe navigation experience. So a Degree 2 robot capable of efficiently tripping elevator systems can be classified as Degree 2+.
Using elevators as the primary means of accessing this functionality may not be feasible due to the need for significant infrastructure modifications to support it. The introduction of additional setup complexity?
Moreover, it’s crucial to acknowledge that elevators pose a distinct social navigation challenge for robots in human-inhabited spaces. Because navigating shared spaces like homes requires precise coordination between multiple parties, including real estate agents, within strict timelines for entering and exiting elevators, while also accommodating unique behavioral traits that emerge when individuals interact within elevator environments.
Robots in ranges one and two heavily depend on infrastructure modifications for navigation, exhibiting limited social navigation capabilities, making them best suited for structured, human-free environments.
Robots of Degree Three boast exceptional cognitive abilities and autonomous decision-making capabilities. While requiring minimal infrastructure changes during setup, these systems do necessitate a thorough mapping and labeling of the surrounding atmosphere. They exhibit average social aptitude and are capable of navigating unscripted environments with a moderate level of human interaction.
Degree four represents a significant advancement towards human-level navigation capabilities, enabling safe and efficient deployment in any indoor environment. Degree 5 robots demonstrate exceptional autonomy, effortlessly navigating previously unseen environments with the same level of proficiency as they would in familiar surroundings. Robots capable of navigating multiple floors are designated with a “+”.

Tendencies throughout ranges. All infographics created by Irina Kim and Jason Hu, Relay Robotics
Autonomous navigation should be dependable
A critical consideration in ensuring satisfaction that is currently overlooked by this model is the overall resilience and dependability of the product. The simplicity with which one might initially perceive complex real-world settings can be deceivingly misleading. While robotic technologies often require several years of domain-specific knowledge to translate theoretical concepts into reliable and trustworthy products that meet users’ expectations,
Relay Robotics showcases its proven track record with Degree 3+, a series of robots that has successfully completed more than 1.5 million profitable deliveries, while amassing extensive real-world operational experience spanning multiple years. With this mature expertise serving as a foundation, the organization is advancing significantly toward achieving Degree 4+ navigation capabilities.
Relying on their expertise to craft understated social interactions, Relay’s autonomous mobile robots (AMRs) excel at navigating busy and anxious settings such as hospital emergency departments, earning them a reputation for being the most discreet in the industry today? For businesses and the global trade, the key to driving progress lies in developing advanced social navigation capabilities that foster seamless connections and informed decision-making.
Despite the remaining challenges, Relay Robotics is leveraging advancements in artificial intelligence and deep learning to make progress.
In regards to the authors
Serving as a senior navigation engineer at Relay Robotics. Prior to this role, she worked as a robotics software engineer at Mayfield Robotics, a notion methods engineer at General Motors, and a robotics engineer at Sphero.
Shripati Deshpande holds a Master’s degree in Robotics Methods Development from Carnegie Mellon University.
As a robotics engineer at Relay Robotics, With the author’s explicit permission this content may be shared publicly.