

{kind=link}
Since underwater robots don’t breathe and don’t require the same buoyancy control as humans, they don’t need inflatable BCDs. Instead, their buoyancy is often controlled through carefully designed hull shapes and weights that allow them to maintain a stable depth in the water column. Nicely, an experimental new one doesThe technology reportedly boasts a significantly enhanced energy efficiency profile compared to traditional methods of ascending and descending within the aquatic environment.
Typically, underwater ROVs (remotely operated vehicles) and AUVs (autonomous underwater vehicles) are engineered to maintain neutral buoyancy. This suggests that objects of this kind remain suspended at a neutral buoyancy state when submerged in water, neither sinking or rising.
To traverse the water column with ease, these entities employ their impressively potent electric thrusters. Utilizing an electrical pump to facilitate the exchange of water between onboard ballast tanks and the surrounding environment presents a viable alternative. In both cases, a significant amount of battery energy is consumed over the course of.
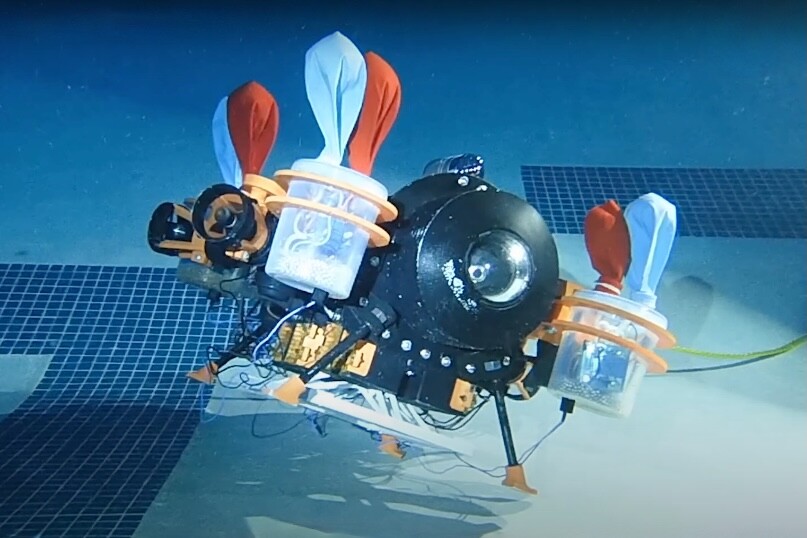
Seeking an eco-friendly alternative, researchers at Rice University’s BayMax group of engineering students turned to reversible water-splitting gas cells. The team incorporated four gadgets into their self-built Remotely Operated Vehicle (ROV), dubbed the Monarch.
Water-splitting gas cells optimize the electrolysis process to cleave liquid water into its constituent parts: hydrogen and oxygen gas. Reversible cells, as their name suggests, are capable of converting the two gases back into a liquid state. As a result of their lower density compared to the liquid, gases typically have a greater volume.
The Monarch exploits this extraordinary phenomenon.
Jeff Fitlow/Rice College
To enhance its buoyancy, the ROV converts distilled water within its gas cells into hydrogen and oxygen, which then fuels balloons situated atop each compartment to expand and increase lift. As air pressure decreases at higher altitudes, the gases in the life jacket’s buoyancy cells expand and transform into a gas state. This reduction in density allows the jacket to maintain its buoyancy and keep the wearer afloat.
The technology can also be leveraged to stabilize the vessel at a precise horizontal angle in the water, achieved through controlled activation of individual cells as needed. As a natural consequence of the buoyancy of both “neutrally” buoyant remotely operated vehicles (ROVs) and autonomous underwater vehicles (AUVs), adjustments at varying depths or in fresh versus saltwater environments result in the system being calibrated to suspend the vehicle at any predetermined depth.
As the electrolysis process employs some Electricity requires significantly less energy to propel a spacecraft to orbit and maintain its position, compared to what would be needed to achieve the same using traditional thrusters. The electrical energy generated by the gas cells could potentially be harnessed to supplement the power required to operate the ROV.
In 2023, researchers at Rice University and the University of Houston published a groundbreaking paper that inspired the development of the Monarch, a pioneering underwater vehicle. According to their findings, fuel-cell-driven depth control could potentially reduce the power consumption of Autonomous Underwater Vehicles (AUVs) by an impressive 85% compared to traditional propulsion systems.
And, in addition, gas cells are purported to be more lightweight and economical than traditional vertical thrusters. The electric propulsion systems are also significantly quieter, making them much less likely to startle underwater wildlife.
Jeff Fitlow/Rice College
In reality, more robust bladder designs could potentially replace traditional rubber balloons, fostering greater efficiency and effectiveness in various applications. The developed technology may also find applications beyond aquatic settings, such as assisting wearable devices or robotic attire for non-water-based uses.
According to BayMax’s Andrew Naked, the project’s unique selling point lies in its innovative approach, which sets it apart from previous attempts due to its precise execution. “As pioneers in integrating this expertise into a cutting-edge tool featuring pitch, roll, and precise control capabilities, we’re genuinely excited about this opportunity.”
Watch as the majestic Monarch butterfly takes flight in this accompanying video below.
The challenge is a collaborative effort among the research laboratories of Rice University’s Professors Fathi Ghorbel and Laura Schaefer, along with Professor from the University of Houston. Zheng Chen.
Pioneering underwater robotics: Energy-efficient buoyancy management revolutionized.
Supply: