

{kind=link}
Why not redirect these industrious creatures’ digging prowess towards cultivating greenery instead of rooting around in rubbish? While traditional coaching methods can be time-consuming and labor-intensive, a creative solution emerged from the innovative mind of Dorothy, a California high school student. Inspired by the unique features of pangolins, she developed robotic To complete the digging and planting tasks efficiently.
The plant-mimicking Plantolin robot has taken top honours at the prestigious Pure Robotics Contest, a competition backed by the British Ecological Society and hosted by the University of Surrey.
Inviting innovators globally to participate in a challenge that encourages the development of eco-friendly robots inspired by nature, designed to tackle a specific environmental issue. The profitable concept will be transformed into a precise, fully functional prototype by several partnering research institutes.
In the case of the Plantolin, the associated body was actually the University of Surrey itself. Partners from various esteemed institutions, including Queen Mary University of London, the Royal Academy of Art, École Polytechnique Fédérale de Lausanne in Switzerland, the Technical University of Munich, and Alexander Humboldt University in Germany, collaborate together. The inaugural champion was an innovative device that successfully eliminated microplastic contaminants from aquatic environments.
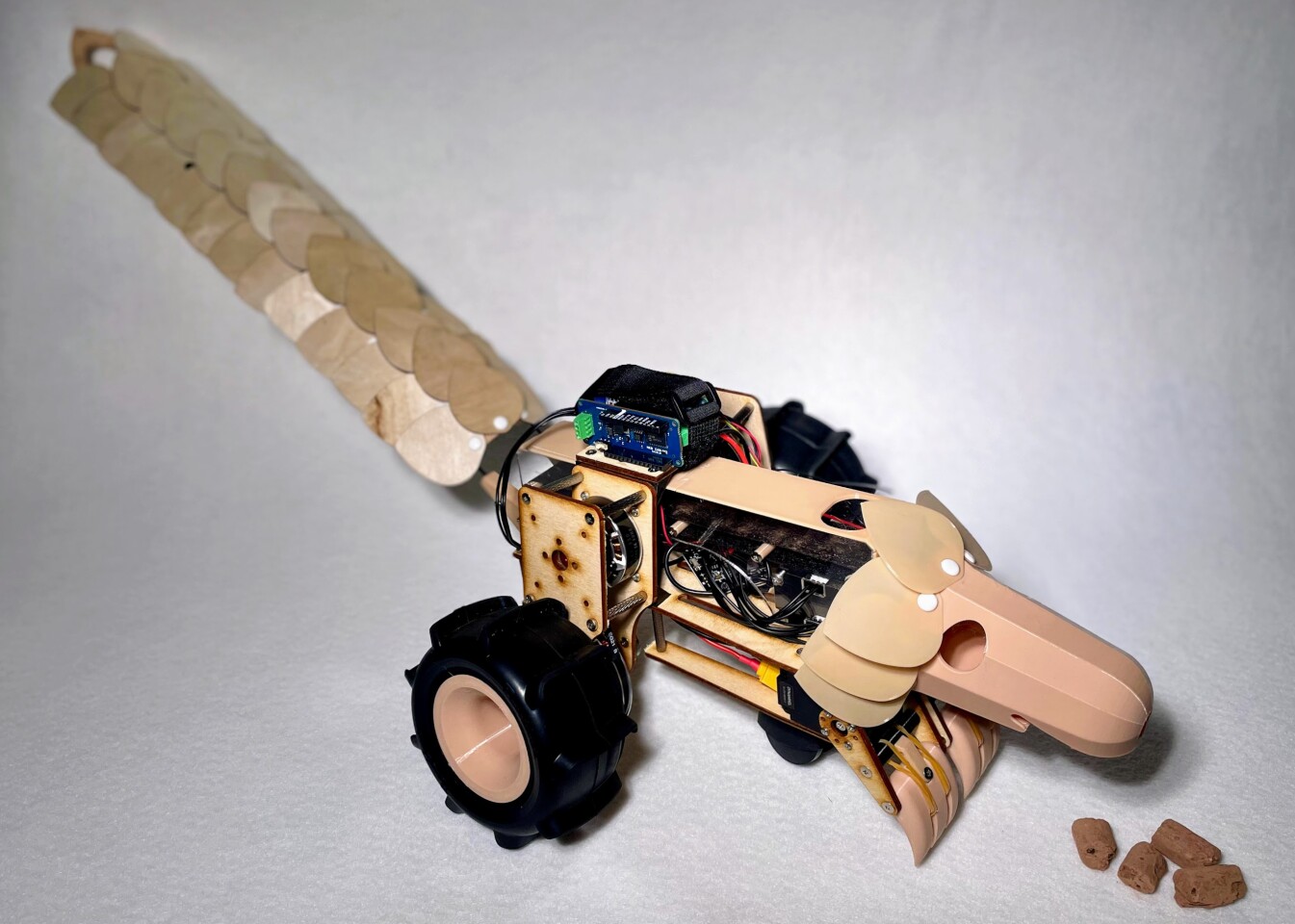
The unvarnished truth about the Plantolin becomes apparent when viewed alongside a few of its seed bombs; remarkably, Dorothy’s innovative design triumphed over 183 competing submissions.
College of Surrey
While a pangolin’s gait is unique, the statement comparing it to the Plantolin’s mode of transportation lacks clarity.
The robots that balance on two wheels are typically referred to as Segways, not Plantolins. This statement is vague and does not provide sufficient information about the Plantolin.
SKIP Each wheel is driven by a robust electrical quadcopter drone motor, capable of generating sufficient torque and power to propel the vehicle forward. When traversing the terrain, the extended tail serves as a stabilizing counterweight for the robot, allowing it to maintain balance and momentum. As the bot comes to a halt to initiate excavation, the tail smoothly tilts downward, providing crucial leverage for the digging process.
With that said, the excavation process is concluded by means of two motorized entrance legs. These claw-like appendages on the legs remain securely engaged as they excavate soil, only relaxing and bending back into a retracted position as they’re pulled forward for the next scoop.
As the excavation begins, the Plantolin rolls over the site, depositing a “seed bomb” – essentially a compacted pellet of yew tree seeds and soil. into The reason is that Bombs are loaded into a dispenser via a slot in the robotic arm’s prime section, then transported to the “tail” end by an internal conveyor belt for dispersion.

A candid shot captures the authentic essence of a genuine pangolin.
Depositphotos
Restoring forests through strategic reforestation efforts is crucial for ensuring a sustainable future on our planet, remarks Dorothy. Pangolins devote considerable time to burrowing beneath the soil, leading me to conceptualize a planter robot inspired by the pangolin’s behavior as an intriguingly straightforward concept.
The plant-inspired robot, known as the Plantolin, was developed by Dr. Robert Siddall, who sheds greater light on the intricacies of the bot’s mechanisms in the accompanying video.
Purely Innovative: Plantolin Takes Top Honours at the 2nd Pure Robotics Competition
Supply: