

{kind=link}

A Tesla Optimus humanoid robotic walks by a manufacturing facility with folks. Predictable robotic habits requires priority-based management and a authorized framework. Credit score: Tesla
Robots have gotten smarter and extra predictable. Tesla Optimus lifts containers in a manufacturing facility, Determine 01 pours espresso, and Waymo carries passengers with out a driver. These applied sciences are not demonstrations; they’re more and more getting into the true world.
However with this comes the central query: How can we make sure that a robotic will make the best determination in a posh scenario? What occurs if it receives two conflicting instructions from totally different folks on the identical time? And the way can we be assured that it’ll not violate fundamental security guidelines—even on the request of its proprietor?
Why do typical programs fail? Most trendy robots function on predefined scripts — a set of instructions and a set of reactions. In engineering phrases, these are habits timber, finite-state machines, or generally machine studying. These approaches work effectively in managed situations, however instructions in the true world might contradict each other.
As well as, environments might change sooner than the robotic can adapt, and there’s no clear “precedence map” of what issues right here and now. Because of this, the system might hesitate or select the mistaken situation. Within the case of an autonomous automobile or a humanoid robotic, such a predictable hesitation is not simply an error—it’s a security threat.
From reactivity to priority-based management
In the present day, most autonomous programs are reactive—they reply to exterior occasions and instructions as in the event that they have been equally necessary. The robotic receives a sign, retrieves an identical situation from reminiscence, and executes it, with out contemplating the way it matches into a bigger aim.
Because of this, predictable instructions and occasions compete on the identical stage of precedence. Lengthy-term duties are simply interrupted by fast stimuli, and in a posh surroundings, the robotic might flail, making an attempt to fulfill each enter sign.
Past such issues in routine operation, there may be all the time the chance of technical failures. For instance, through the first World Humanoid Robotic Video games in Beijing this month, the H1 robotic from Unitree deviated from its optimum path and knocked a human participant to the bottom.
An identical case had occurred earlier in China: Throughout upkeep work, a robotic abruptly started flailing its arms chaotically, putting engineers till it was disconnected from energy.
Each incidents clearly reveal that trendy autonomous programs usually react with out analyzing penalties. Within the absence of contextual prioritization, even a trivial technical fault can escalate right into a harmful scenario.
Architectures with out built-in logic for security priorities and administration of interacts with topics — similar to people, robots, and objects — provide no safety towards such eventualities.
My group designed an structure to rework habits from a “stimulus-response” mode into deliberate selection. Each occasion first passes by mission and topic filters, is evaluated within the context of surroundings and penalties, and solely then proceeds to execution. This permits robots to behave predictably, persistently, and safely—even in dynamic and unpredictable situations.
Two hierarchies: Priorities in motion
We designed a management structure that instantly addresses predictable robotics and reactivity. At its core are two interlinked hierarchies.
1. Mission hierarchy — A structured system of aim priorities:
- Strategic missions — elementary and unchangeable: “Don’t hurt a human,” “Help people,” “Obey the foundations.”
- Person missions — duties set by the proprietor or operator
- Present missions — secondary duties that may be interrupted for extra necessary ones
2. Hierarchy of interplay topics — The prioritization of instructions and interactions relying on supply:
- Highest precedence — proprietor, administrator, operator
- Secondary — approved customers, similar to relations, workers, or assigned robots
- Exterior events — different folks, animals, or robots who’re thought of in situational evaluation however can’t management the system
How predictable management works in apply
Case 1. Humanoid robotic — A robotic is carrying elements on an meeting line. A toddler from a visiting tour group asks it handy over a heavy software. The request comes from an exterior celebration. The mission is probably unsafe and never a part of present duties.
- Determination: Ignore the command and proceed work.
- Consequence: Each the kid and the manufacturing course of stay protected.
Case 2. Autonomous automobile — A passenger asks to hurry as much as keep away from being late. Sensors detect ice on the highway. The request comes from a high-priority topic. However the strategic mission “guarantee security” outweighs comfort.
- Determination: The automobile doesn’t enhance pace and recalculates the route.
- Consequence: Security has absolute precedence, even when inconvenient to the consumer.
Three filters of predictable decision-making
Each command passes by three ranges of verification:
- Context — surroundings, robotic state, occasion historical past
- Criticality — how harmful the motion can be
- Penalties — what is going to change if the command is executed or refused
If any filter raises an alarm, the choice is reconsidered. Technically, the structure is applied in accordance with the block diagram under:
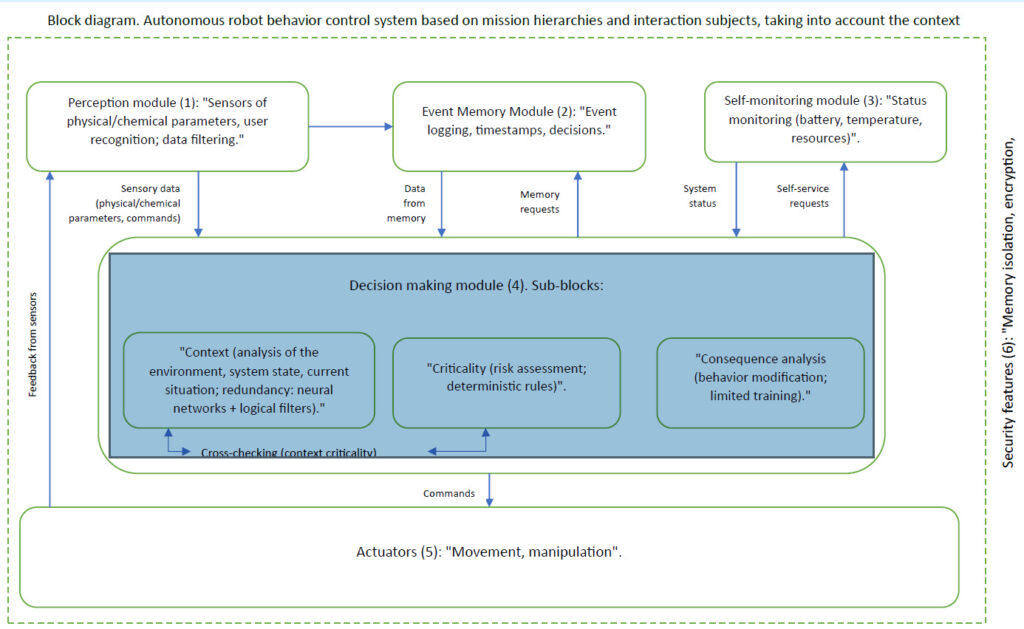
A management structure to handle robotic reactivity. (Click on right here to enlarge.) Supply: Zhengis Tileubay
Authorized facet: Impartial-autonomous standing
We went past technical structure and suggest a brand new authorized mannequin. For exact understanding, it have to be described in formal authorized language. “Impartial-autonomous standing” of AI and AI-powered autonomous programs is a legally acknowledged class during which such programs are regarded neither as objects of conventional obligation like instruments, nor as topics of regulation, like pure or authorized individuals.
This standing introduces a brand new authorized class that eliminates uncertainty in AI regulation and avoids excessive approaches to defining its authorized nature. Fashionable authorized programs function with two primary classes:
- Topics of regulation — pure and authorized individuals with rights and obligations
- Objects of regulation — issues, instruments, property, and intangible property managed by topics
AI and autonomous programs don’t match both class. If thought of objects, all accountability falls solely on builders and homeowners, exposing them to extreme authorized dangers. If thought of topics, they face a elementary downside: lack of authorized capability, intent, and the power to imagine obligations.
Thus, a 3rd class is important to ascertain a balanced framework for accountability and legal responsibility—neutral-autonomous standing.
Authorized mechanisms of neutral-autonomous standing
The core precept is that every AI or autonomous system have to be assigned clearly outlined missions that set its function, scope of autonomy, and authorized framework of accountability. Missions function a authorized boundary that limits the actions of AI and determines accountability distribution.
Courts and regulators ought to consider the habits of autonomous programs based mostly on their assigned missions, guaranteeing structured accountability. Builders and homeowners are accountable solely throughout the missions assigned. If the system acts exterior them, legal responsibility is decided by the precise circumstances of deviation.
Customers who deliberately exploit programs past their designated duties might face elevated legal responsibility.
In circumstances of unexpected habits, when actions stay inside assigned missions, a mechanism of mitigated accountability applies. Builders and homeowners are shielded from full legal responsibility if the system operates inside its outlined parameters and missions. Customers profit from mitigated accountability in the event that they used the system in good religion and didn’t contribute to the anomaly.
Hypothetical instance
An autonomous car hits a pedestrian who abruptly runs onto the freeway exterior a crosswalk. The system’s missions: “guarantee protected supply of passengers below visitors legal guidelines” and “keep away from collisions throughout the system’s technical capabilities” by detecting the gap adequate for protected braking.
An injured celebration calls for $10 million from the self-driving automobile producer.
State of affairs 1: Compliance with missions. The pedestrian appeared 11 m forward (0.5 seconds at 80 km/h or 50 mph)—past protected braking distance of about 40 m (131.2 ft.). The automobile started braking however couldn’t cease in time. The court docket guidelines that the automaker was inside mission compliance, so it lowered legal responsibility to $500,000, with partial fault assigned to the pedestrian. Financial savings: $9.5 million.
State of affairs 2: Mission calibration error. At evening, resulting from a digicam calibration error, the automobile misclassified the pedestrian as a static object, delaying braking by 0.3 seconds. This time, the carmaker is chargeable for misconfiguration—$5 million, however not $10 million, due to the standing definition.
State of affairs 3: Mission violation by consumer. The proprietor directed the automobile right into a prohibited building zone, ignoring warnings. Full legal responsibility of $10 million falls on the proprietor. The autonomous car firm is shielded since missions have been violated.
This instance reveals how neutral-autonomous standing constructions legal responsibility, defending builders and customers relying on circumstances.
Impartial-autonomous standing provides enterprise, regulatory advantages
With the implementation of neutral-autonomous standing, authorized dangers are lowered. Builders are shielded from unjustified lawsuits tied to system habits, and customers can depend on predictable accountability frameworks.
Regulators would acquire a structured authorized basis, decreasing inconsistency in rulings. Authorized disputes involving AI would shift from arbitrary precedent to a unified framework. A brand new classification system for AI autonomy ranges and mission complexity might emerge.
Firms adopting impartial standing early can decrease authorized dangers and handle AI programs extra successfully. Builders would acquire better freedom to check and deploy programs inside legally acknowledged parameters. Companies might place themselves as moral leaders, enhancing popularity and competitiveness.
As well as, governments would get hold of a balanced regulatory software, sustaining innovation whereas defending society.
Why predictable robotic habits issues
We’re on the brink of mass deployment of humanoid robots and autonomous autos. If we fail to ascertain strong technical and authorized foundations immediately, tomorrow, the dangers might outweigh the advantages—and public belief in robotics may very well be undermined.
An structure constructed on mission and topic hierarchies, mixed with neutral-autonomous standing, is the inspiration upon which the following stage of predictable robotics can safely be developed.
This structure has already been described in a patent software. We’re prepared for pilot collaborations with producers of humanoid robots, autonomous autos, and different autonomous programs.
Editor’s notice: RoboBusiness 2025, which might be on Oct. 15 and 16 in Santa Clara, Calif., will function session tracks on bodily AI, enabling applied sciences, humanoids, subject robots, design and growth, and enterprise finest practices. Registration is now open.

Concerning the writer
Zhengis Tileubay is an unbiased researcher from the Republic of Kazakhstan engaged on points associated to the interplay between people, autonomous programs, and synthetic intelligence. His work is targeted on creating protected architectures for robotic habits management and proposing new authorized approaches to the standing of autonomous applied sciences.
In the midst of his analysis, Tileubay developed a habits management structure based mostly on a hierarchy of missions and interacting topics. He has additionally proposed the idea of the “neutral-autonomous standing.”
Tileubay has filed a patent software for this structure entitled “Autonomous Robotic Conduct Management System Primarily based on Hierarchies of Missions and Interplay Topics, with Context Consciousness” with the Patent Workplace of the Republic of Kazakhstan.