

{kind=link}
A cutting-edge, wheel-based robotic system is poised to revolutionize the climbing of steel structures with its uniquely intelligent and adaptable approach: an extendable, tape-measure inspired limb allows for unparalleled flexibility and precision. Descendants of the bot may eventually uncover opportunities to investigate and possibly mend infrastructure such as towers, bridges, energy facilities, and vessels.
Though we have Noted robotic systems have been designed to navigate and interact with various surfaces, including those with a vertical orientation. While some of these designs excel at traversing rough terrain or navigating through cluttered environments, others are optimized for precision tasks that require a combination of strength, dexterity, and adaptability. While earlier robots struggled to overcome relatively minor hurdles, the more recent models have excelled at navigating such challenges with their deliberate pace and sophisticated mechanics.
The EEWOC, a Prolonged-Reach Enhanced Wheeled Orb for Climbing, is designed to operate from this location. The experimental robotic was created by Justin Quan, Mingzhang Zhu and Dennis Hong from UCLA’s Robotics & Mechanisms Laboratory (RoMeLa).
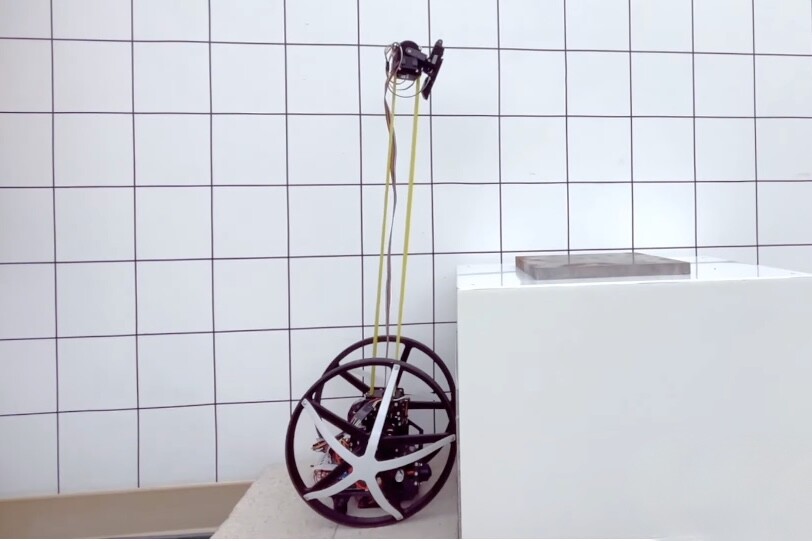
As it navigates various horizontal surfaces, the self-balancing bot effortlessly glides along on its two wheels when positioned at the bottom or on a different surface. When it’s time to scale vertical surfaces, the EEWOC deploys its Elastic Extending Mechanism for Mobility and Manipulation, also known as its EEMMM limb.
RoMeLa
The system features a motorized reel housing a steel measuring tape, seamlessly integrated within the robotic’s structure. The tape stretches vertically from the robotic arm, curves into a reversed U-shape, and then continues downward to secure itself at the top of the mechanism.
As the tape wraps around the curved surface of the inverted U-shaped track, it passes through a pulley situated within the end-effector device. This instrument features a top-mounted, adjustable-angle electromagnet for added versatility.
The EEMMA’s initial step in traditional climbing is to unfurl its climbing tape. This flexible arm’s movement causes the limb to extend up to 1.2 meters or 3.9 feet in length, while keeping the end-effector instrument always within the curve of the primary bend. The magnet on the instrument secures the steel plate, allowing the robot to self-propel upwards. to The instrument could simply be rewound with a fresh section of tape, ready for another recording session. As the EEMMMa is redeployed and re-extended for the subsequent phase of ascent, it remains stationary on the steel structure, secured by its integrated, bottom-mounted magnet.

RoMeLa
While ascending and navigating around edges, the EEMMMa prolongs its tape but the end-effector’s braking action prevents the tape from slipping through. As the tape is aligned, it naturally bunches and kinks at a precise angle, permitting the magnet to reach its previously inaccessible target with ease. As the bot approaches the magnet, it pulls itself with increasing force, finally rolling over the edge and completing the course.
Watch this video for an in-depth explanation of the limb’s functionality, followed by a comprehensive article that delves deeper into its mechanics.
EEMMMa: Novel Extending and Bending Robotic Limb – ASME Journal of Mechanical Research, 2022 – A 2-Minute Overview
The Earth Exploration Vehicle Observatory, currently, has a diameter of 260 millimeters or 10.2 inches, and its weight is approximately 2.1 kilograms or 4.6 pounds when suggesting its scale sizes. The robot boasts an impressive climbing speed of 0.24 meters per second, or 0.79 feet per second, earning it a spot among the fastest climbing robots in existence.
Future plans involve arming the bot with multiple EEMMMa units capable of being extended in various configurations to enable omnidirectional movement. Scientists also propose employing non-magnetic EEMMMa grippers capable of grasping surfaces such as wood or walls, providing a versatile solution for various applications.
Watch as a robotic climber moves with metallic fluidity through the video below, effortlessly spanning horizontal chasms like a modern-day Indiana Jones. Papers were presented on both topics at the ASME 2023 Worldwide Design Engineering Technical Conferences and Computers & Information in Engineering Convention.
Robots With Extendable And Flexible Arms (REEFA): A Novel Climbing Robot Equipped With A Long-Range Measuring Capability.
Supply: by way of