

{kind=link}
| Hearken to this text |
Researchers at ETH Zurich and the Max Planck Institute for Intelligent Systems have created a revolutionary robotic leg powered by synthetic muscle tissue. With remarkable adaptability, the robotic leg navigates a variety of terrain with ease, its agility and energy efficiency rendering it highly effective.
Analogous to human physiology, where extensor and flexor muscles collaborate to enable smooth movement, robotic legs require harmonious interactions between their equivalent actuators to execute commands seamlessly? Researchers have developed a novel electro-hydraulic actuator system, dubbed HASELs, which is connected to the skeleton via tendons.
There were oil-filled plastic luggage, similar in construction to the containers that formerly produced ice cubes. Around 50% of each bag’s surface area features double-sided coating with a black electrode crafted from conductive materials. As soon as a voltage is applied to the electrodes, they exhibit an instantaneous attraction due to the presence of static electrical energy. When I rub a balloon against my head, my hair adheres to it due to the shared static electricity. Meanwhile, as you amplify the voltage, the electrodes draw closer, propelling the oil inside the bag towards one side and thereby reducing its overall length.
When pairs of actuators are connected to a skeleton, they produce identical paired muscle actions similar to those found in living creatures; as one muscle shortens, its corresponding partner lengthens. Researchers employ a computer code that interfaces seamlessly with high-voltage amplifiers to control the precise contraction or lengthening of specific actuators.
Completely eco-friendly?
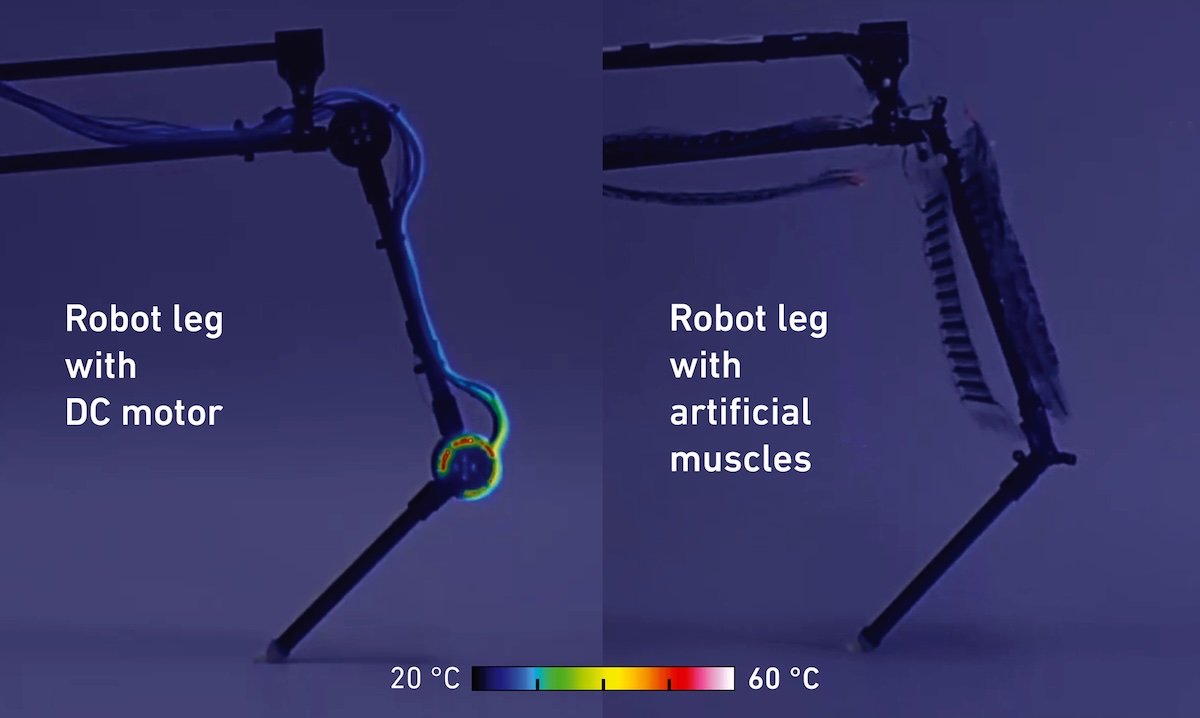
Researchers compared the vitality and effectiveness of their robotic leg, which was powered by a novel mechanism, to that of a traditional robotic leg driven by an electric motor. Despite various challenges, researchers focused on identifying how excessive energy is wasted as heat.
According to Buchner, on an infrared image, it is evident that the motorized leg expends significantly more energy when, for instance, it needs to navigate a curved path. The temperature inside the electro-hydraulic leg remains constant. Because the synthetic muscle is electrostatic in nature. “When discussing instances where hair becomes entangled with balloons, Buchner noted that the strands can remain stuck for an extended period.” Typically, electric motors in robots demand thermal management to prevent overheating, necessitating additional heat sinks or fans to dissipate the excess heat into the surrounding air. Toshihiko Fukushima, a doctoral scholar at ETH Zurich, noted that their system does not demand such specifications.

.
A robotic leg with remarkably agile movement traverses challenging, irregular terrain.
The robotic leg’s ability to leap hinges on its capacity to rapidly and explosively generate lift, thereby offsetting its own substantial weight. Researchers have further validated that the robotic leg exhibits an exceptional degree of adaptability, making it particularly crucial in the context of delicate robotics. Can the musculoskeletal system’s inherent elasticity enable flexible adaptation to varying terrain?
“It’s not surprising that dwelling creatures are also affected differently.” According to Robert Katzschmann, founder of ETH Zurich’s Gentle Robotics Lab, difficulties arise when we’re unable to bend our knees, such as navigating uneven floors that become significantly more challenging. Consider taking a single, deliberate step from the pavement down to the street.
Unlike electrical motors that rely on sensors to constantly monitor a robotic leg’s orientation, the synthetic muscle responds instinctively to its environment through intuitive interaction. The mechanism is driven by two distinct triggers: a downward push to flex the hinge and an upward push to amplify its movement.
“Flexibility in adapting to varying terrain is crucial.” As individuals land after jumping into the air, they don’t need to speculate hastily about whether they should bend their knees at a precise 90-degree or 70-degree angle, according to Fukushima. Upon landing, the robotic leg’s musculoskeletal system adjusts its articulation to conform to the terrain’s rigidity or softness, allowing for a precise and adaptable response.
As robotic legs remain stationary for extended periods, significant power is transmitted through the DC motor that powers them. As time passes, the essence of life’s vigor becomes increasingly intertwined with the comforting glow of warmth. While synthetic muscle tissues that operate based on electrostatic principles remain cool due to the absence of current flow under constant loads, their environmentally friendly nature allows them to maintain a stable temperature. What are the credit scores?
As proficiency grows, fresh possibilities emerge.
The discipline of electro-hydraulic actuator analysis is still relatively young, having developed over the course of just about six years. The pace of advancements in robotics is accelerating, driven by breakthroughs in control systems and artificial intelligence. In contrast, significant strides have yet to be made in robotic hardware, despite its equal importance.
While Katzschmann notes that electro-hydraulic actuators may not be suitable for heavy equipment applications, they still offer distinct advantages over traditional electric motors in certain scenarios. The functionality of grippers is notably apparent in instances where the actions required are highly tailored, dependent on whether the object being gripped is, for example, a ball, an egg, or a tomato, necessitating distinct approaches to effectively secure and manipulate each item.
While Katzschmann acknowledges a limitation of their robotic system, he notes that “in contrast to strolling robots powered by electrical motors, our system still has its constraints.” The leg remains attached to a rod, performing circular motions with limited mobility.
Future research should aim to overcome these constraints, paving the way for the development of functional biomimetic constructs featuring synthetic muscle tissue. He further explains that by integrating the robotic leg into a quadruped or humanoid robot equipped with either two legs, the potential exists for developing a rescue robot that can be deployed in the future once powered by batteries.