{kind=link}

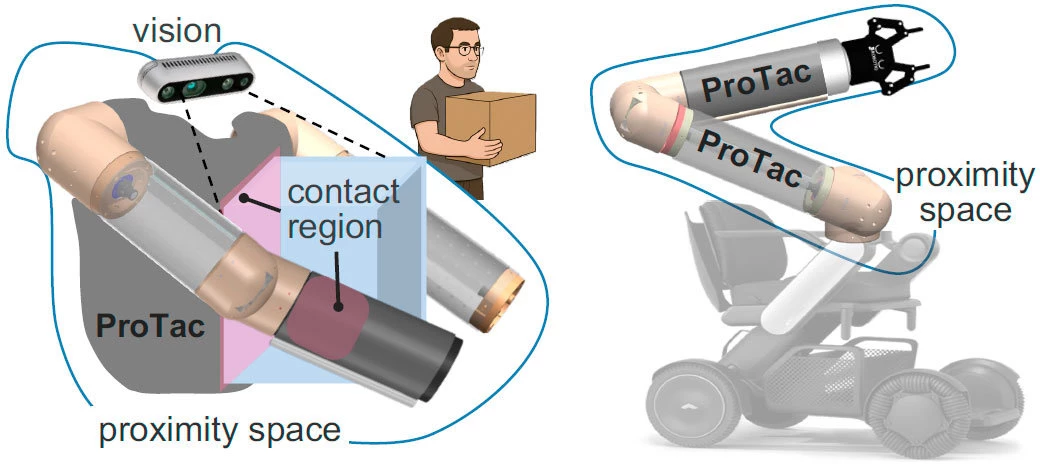
To ensure that robots to function safely round people, they should see that persons are approaching and they should know after they make bodily contact with these individuals. A brand new system permits them to do each, utilizing cameras positioned inside their arms.
Referred to as ProTac (Professionalximity and Tactile sensing), the expertise is being developed by Prof. Van Anh Ho, Dr. Quan Khanh Luu and colleagues on the Japan Superior Institute of Science and Expertise (JAIST). It has been included right into a cylindrical robotic arm phase referred to as the ProTac hyperlink, though it may be utilized in different physique elements.
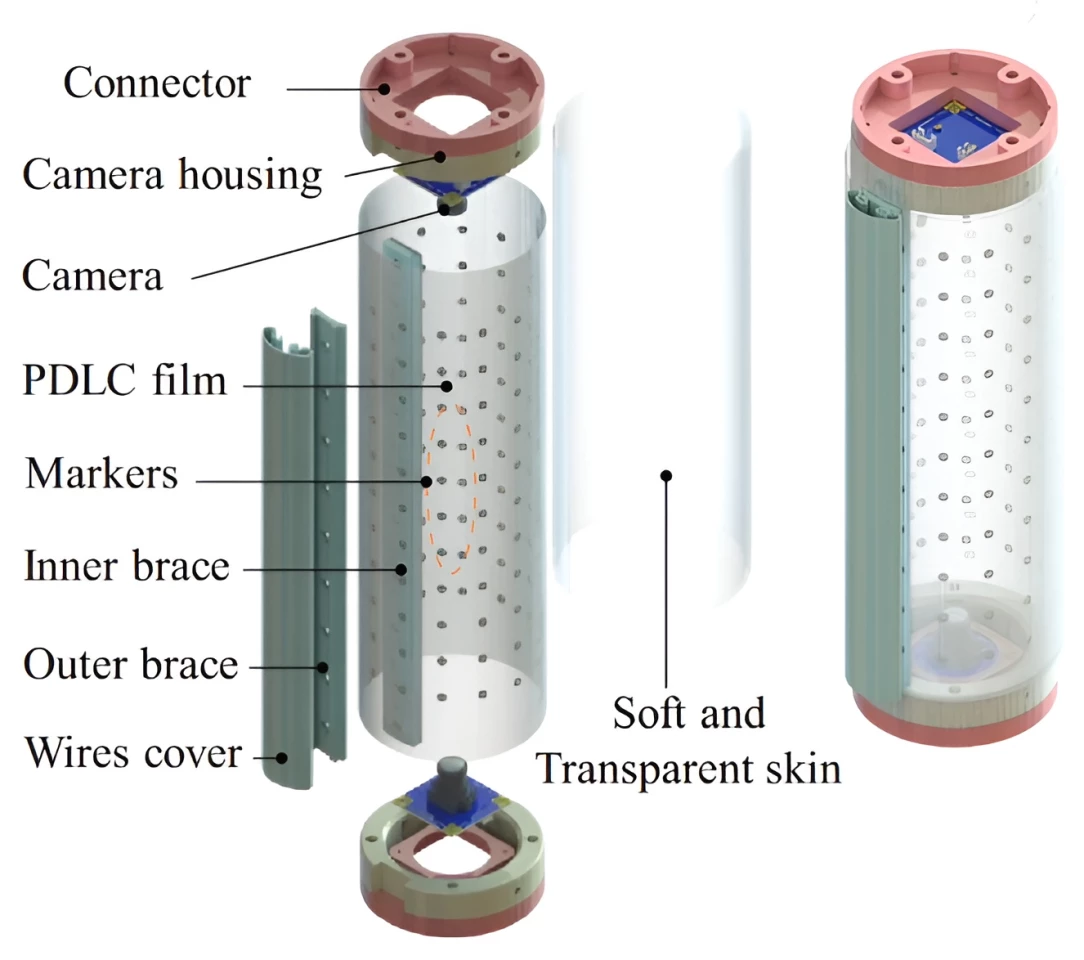
The hole appendage has a smooth, clear polymer pores and skin, which is roofed in a versatile layer of polymer-dispersed liquid crystal (PDLC) materials. By making use of voltage to the PDLC, it may be rapidly switched between clear and opaque states. On the within floor of the PDLC is an array of spaced marker dots, which keep opaque always.
Two stereoscopic cameras are positioned contained in the arm – one at both finish – the place they give the impression of being down the size of the within of the appendage.
Van Anh Ho from JAIST
When the PDLC is clear, the computer-vision-enabled cameras are in a position to see by way of it and understand the skin world. If an object equivalent to an individual is seen to be closing in, a robotic utilizing the ProTak hyperlink might both cease transferring in order to not damage that particular person, or transfer out of the way in which to keep away from contacting them.
When the PDLC is opaque, the cameras simply see the array of dots suspended over a black background. If somebody touches the versatile pores and skin, the stress causes the spacing between the dots to alter at that location. Subsequently, when the cameras see such deformations going down, they’re in a position to decide the place the arm is being touched, and with what quantity of power.
As an added bonus, ProTac could be set to a “flicker mode” during which the PDLC constantly (and quickly) switches forwards and backwards between its clear and opaque states. This enables the system to likewise swap forwards and backwards between proximity- and tactile-sensing, so it might each observe transferring individuals and know after they contact the arm.
Van Anh Ho from JAIST
“ProTac could be utilized to dexterous robotic manipulation in varied domains the place security and delicate bodily interplay are important,” says Dr. Luu.
A paper on the analysis was just lately printed within the journal IEEE Transactions on Robotics.
T-RO: Imaginative and prescient-based Proximity and Tactile Sensing for Robotic Arms: Design, Notion, and Management
Supply: JAIST