{kind=link}

As I lay helpless on the rugged mountainside, my mind racing with every possible worst-case scenario, my shaking fingers fumble for the satellite phone’s worn keypad. The words tumble out in a jumbled rush: “Mayday… Mayday… Injured… Mountain… Need help… Please hurry…” If Italian research proves accurate, the first responders might be miniature human-like robots equipped with jetpacks.
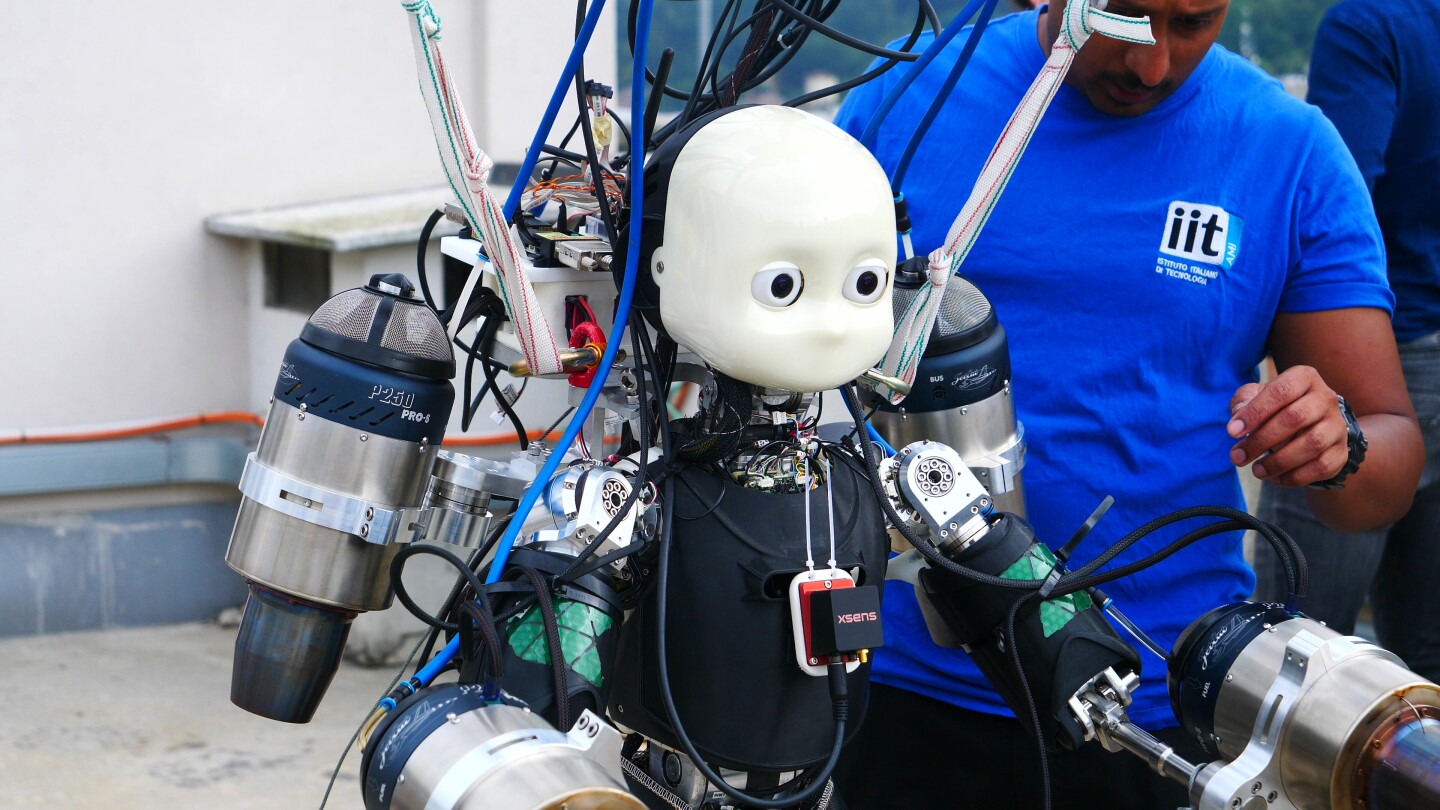
Researchers at Italy’s Istituto Italiano di Tecnologia have revamped a childlike bipedal robot, originally designed for artificial intelligence analysis, with the goal of propelling it upward using jet propulsion technology.
To further enhance the performance of its robotic companion, the team opted to attach a pair of high-powered jet packs to its back, sacrificing the original model’s adaptable human-like limbs for additional firepower from two upgraded JetCat systems. According to the researchers, the maximum thrust reaches 1,000 N, approximately equivalent to 225 pounds-force, while exhaust temperatures can surge to an extreme 800°C or 1,472°F.
iRonCube Sneak Peek: Experimental Space and Preliminary Validations?
The Tony Stark-inspired iRonCube has been equipped with a newly developed titanium backbone to counteract the forces at play, substituting its original cool outer casing with heat-resistant covers. Newly developed electronics have been integrated into the latest design of a jetpack, featuring the incorporation of force-torque sensors to enhance the overall performance and efficiency of the system, with various components eliminated to accommodate the upgrade.
As the video clearly shows, the company is still in its infancy, yet the team has successfully tested the jet-powered humanoid robot in a wind tunnel to verify complex aerodynamics simulations. Although significant progress has been made in powering up the jets, the IronCube has yet to demonstrate sustained flight – although the team remains confident that hovering capability will be achieved soon.
Innovative flight management algorithms have been successfully developed, thoroughly examined, and their efficacy validated through rigorous simulation testing, with a particularly notable achievement being the validation of a cutting-edge trajectory planning module. The workforce is currently working on estimating a robot’s position and orientation within a home environment, leveraging data from its inertial measurement unit and chest-mounted ActualSense depth camera.
Istituto Italiano di Tecnologia
“The complexity of this analysis significantly diverges from the traditional challenges faced in humanoid robotics,” noted the researchers. Thermodynamic systems play a critical role in complex energy conversions, where turbine exhaust gases reach scorching temperatures of approximately 800°C and velocities approaching the speed of sound. Aerodynamics, meanwhile, demands advanced computational tools incorporating neural networks with physics-based components to ensure real-time evaluations; controller settings necessitate seamless integration of high- and low-bandwidth actuators functioning as joints and generators; and planners must simultaneously generate motor dynamics and optimize turbine trajectories. Experimental validation is just as crucial as harmful, leaving no margin for error.
The ultimate objective is to develop humanoid robots capable of flying to crisis zones and providing critical intelligence to emergency responders by conducting aerial assessments or disseminating vital information remotely. Furthermore, this robot will possess the ability to land safely, navigate around obstacles, traverse stairs, access areas through open doors, and execute various other complex tasks with precision and dexterity. This technology could have significant benefits in various scenarios, including initial response efforts and assessments of hazardous structures or critical infrastructure.
Supply: