{kind=link}


Researchers at MIT have designed a groundbreaking, camera-equipped contact sensor that mimics the shape and flexibility of a human finger, offering unparalleled versatility in applications ranging from robotics to medical devices. Their innovative system, capable of delivering high-definition tactile feedback across vast areas, has the potential to enable a robotic hand to execute a wide range of grasp types.
Envision grasping a substantial tool, such as a pipe wrench, firmly in a single hand? You would likely grasp the wrench firmly with your entire hand, rather than relying solely on your fingertips. Sensitive receptors within your pores and skin, running along the length of each finger, transmit information to your brain about the texture you’re grasping.
In robotic hands, miniature cameras in tactile sensors are typically integrated into the fingertips due to their compact and flat design, enabling precise object detection. These robots use their fingertips alone to grasp and understand objects, often employing a subtle pinching motion. These restrictions define the extent of tasks they will execute.
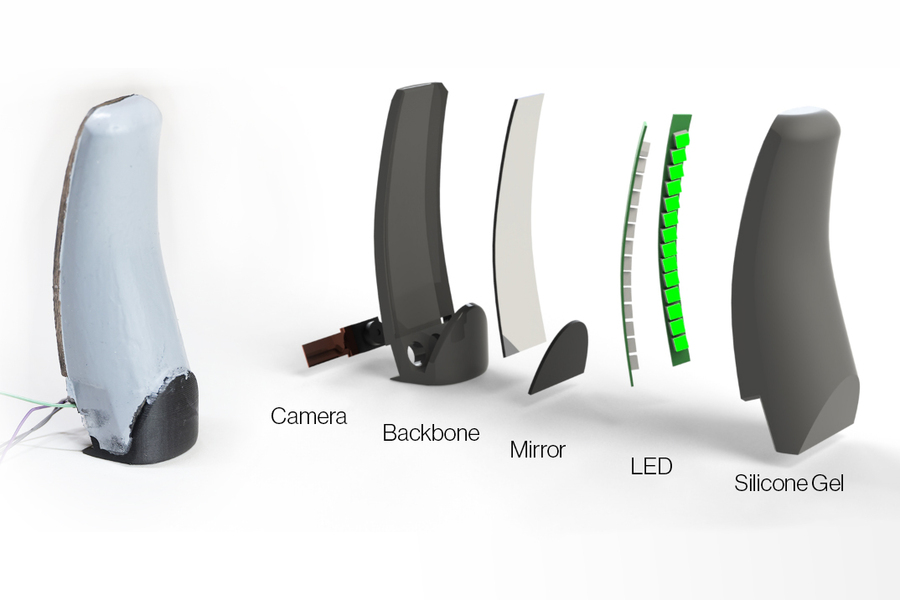
Researchers at MIT have created a novel camera-based contact sensor shaped like a human finger, featuring a lengthened, curved design capable of detecting subtle changes in pressure and movement. The system provides high-resolution tactile sensing capabilities over a large spatial area. The GelSight Svelte sensor employs a dual-mirror setup to redirect and reflect light, enabling a single camera at its base to capture the entire length of a user’s finger in sharp detail.
Researchers designed a finger-shaped sensor featuring a flexible spine that offers versatility. By monitoring the subtle curvature of the spine as the finger makes contact with an object, they aim to accurately gauge the drive’s alignment on the sensor.
Employing GelSight Svelte sensors, the device was able to simulate human-like grasping capabilities, fully utilising the entire sensing surface of its three-fingered configuration. The hand may also perform standard pinch grasps characteristic of traditional robotic grippers.

The GIF showcases a robotic hand equipped with three advanced GelSight Svelte sensors, mimicking the flexibility of human fingers. The advanced sensors enable high-resolution tactile feedback across a broad area, permitting the hand to execute various grasping actions, including delicate pinch grasps utilizing only the fingertips, as well as influence grasps leveraging the collective sensing capabilities of all three fingers.
Because our innovative sensor mimics the human finger’s shape and dexterity, we can employ it to perform a range of grasp techniques, effectively replacing traditional pinch grasping methods across multiple tasks. There’s so much you’re able to accomplish with a parallel jaw gripper. According to Alan Jialiang Zhao, a mechanical engineering graduate student and lead author of the GelSight Svelte study, their sensor presents unprecedented opportunities for novel robotic manipulation applications.
Zhao co-authored the paper with Edward Adelson, the esteemed John and Dorothy Wilson Professor of Visionary and Innovative Science at Harvard University’s Division of Mind and Cognitive Sciences, and a prominent researcher affiliated with MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL). The analysis is expected to be presented at the IEEE Conference on Innovative Robotics and Technologies.
Mirror mirror
Cameras embedded in tactile sensors are limited by their measurement capabilities, the fixed focal length of their lenses, and their inherent viewing angles. Given the constraints of these tactile sensors, they typically remain compact and planar, limiting their application to a robot’s fingertips alone.
With its enhanced sensing capabilities, mimicking a human finger’s dexterity, the camera can now sit further away from the sensing plane, capturing your entire space with greater ease. The design is inherently challenging due to the constraints imposed by measurement and form limitations of a robotic gripper?
Researchers Zhao and Adelson addressed this limitation by employing a dual-mirror setup that redirected and focused light onto a single camera positioned at the fingertip’s base.
The GelSight Svelte’s innovative design features a single, flat, and angled mirror situated parallel to the camera, while a longer, curved mirror is positioned along the back of the sensor. These mirrors redirect soft light from the camera in a way that allows the camera to capture the entire length of your finger.
Researchers developed a bespoke software programme to accurately model the interplay between sunshine’s reflection and refraction, thereby optimising the shape and curvature of the mirrors to perfection.
“With this software program, we’ll experimentally manipulate the placement and curvature of the mirrors to gain insight into how well the image will be captured once we integrate the sensor.”
The mirrors, digicam, and two units of LEDs for illumination are connected to a flexible plastic spine and encased in a versatile silicone gel skin. The digital camera captures the reverse side of the skin from an internal perspective; leveraging deformation, it can visualize where contact occurs and quantify the geometry of the object’s contacting surface.
The components comprising the finger-like contact sensor’s design comprise a delicate harmony of materials and technologies. Firstly, at its core lies an array of capacitive sensors, ingeniously crafted to detect subtle changes in capacitance as fingers approach or touch the surface. These sensors are strategically arranged to cover the entire sensor area, ensuring seamless coverage and accuracy.
Next, the sensor’s outer casing is fashioned from a durable yet flexible material, carefully selected to withstand the rigors of everyday use while maintaining its tactile responsiveness. This clever design allows for effortless manipulation of the sensor by fingers or other objects, facilitating precise control over the device’s operations.
The pink and inexperienced LED arrays provide a visual indicator of the depth to which the gel is being compressed when an object is grasped, as the saturation of color varies across distinct regions on the sensor.
Researchers can utilize this colour saturation data to recreate a three-dimensional depth image of the object being manipulated.
The sensor’s flexible plastic spine enables it to gather proprioceptive information, including the subtle twisting torques applied to the finger. As an individual grips an object, their spine naturally adapts by bending and flexing in response to the physical interaction. Researchers employ machine learning algorithms to quantify the extent of drive applied to sensors based on spinal deformation patterns.
Combining the disparate components into a functioning sensor proved to be a complex and challenging task, according to Zhao.
While ensuring a precise curvature match between the physical mirror and our simulated model proves challenging? Some types of superglue actually hinder the curing process of silicone when used in close proximity? After numerous trials and iterations, he remarks, “We finally succeeded in developing a reliable sensor.”
Versatile greedy
As soon as the design was finalized, the researchers rigorously tested the GelSight Svelte by applying various objects, such as a screw, to diverse areas of the sensor, evaluating the resulting image quality and assessing its ability to accurately discern the object’s shape?
The researchers leveraged three sensors to develop a GelSight Svelte hand capable of executing various grasping actions, including a pinch grasp, lateral pinch grasp, and a force grasp that fully utilizes the three-finger sensing space. While most robotic fingers designed as parallel jaw drippers typically excel in performing pinch grasps?
A three-finger energy grasp enables a robotic hand to hold heavier objects more securely and stably. Despite these limitations, pinch grasps still prove useful for manipulating tiny objects. The capability to execute various grasp types with a single hand would significantly enhance a robot’s dexterity and versatility.
By advancing their research, the scientists intend to enhance the GelSight Svelte by incorporating a flexible design that allows the sensor to mimic the articulation of a human finger, bending at its joints for added versatility.
Robotic systems utilize optical-tactile finger sensors that leverage inexpensive cameras to capture high-definition images of floor contact patterns, enabling real-time estimation of the deformation caused by different floor types and the corresponding forces applied. “This innovation builds upon the GelSight finger design, incorporating advancements in comprehensive finger coverage and a capacity for estimating bending deflection torques through image processing and machine learning,” remarks Monroe Kennedy III, an assistant professor of mechanical engineering at Stanford University, who did not participate in this research. “Bridging the gap between robotic tactile perception and human dexterity requires a critical step forward, potentially unlocking the potential for advanced, sophisticated robotic capabilities.”
The Toyota Research Institute partially supports this analysis.

MIT Information